1.组态驱动器
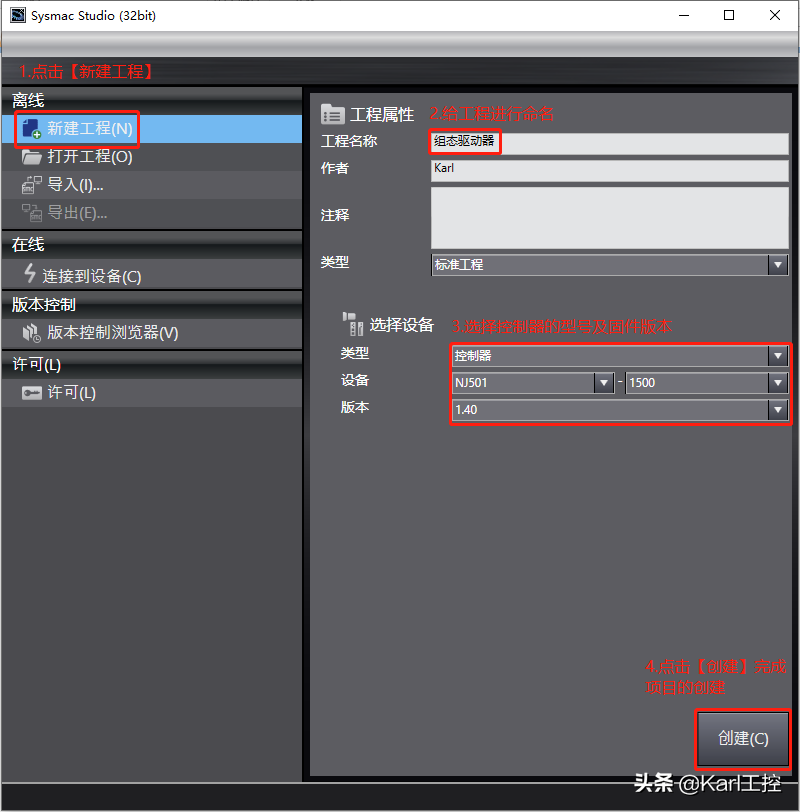
1.1新建一个项目
双击SysmacStudio软件图标,打开软件

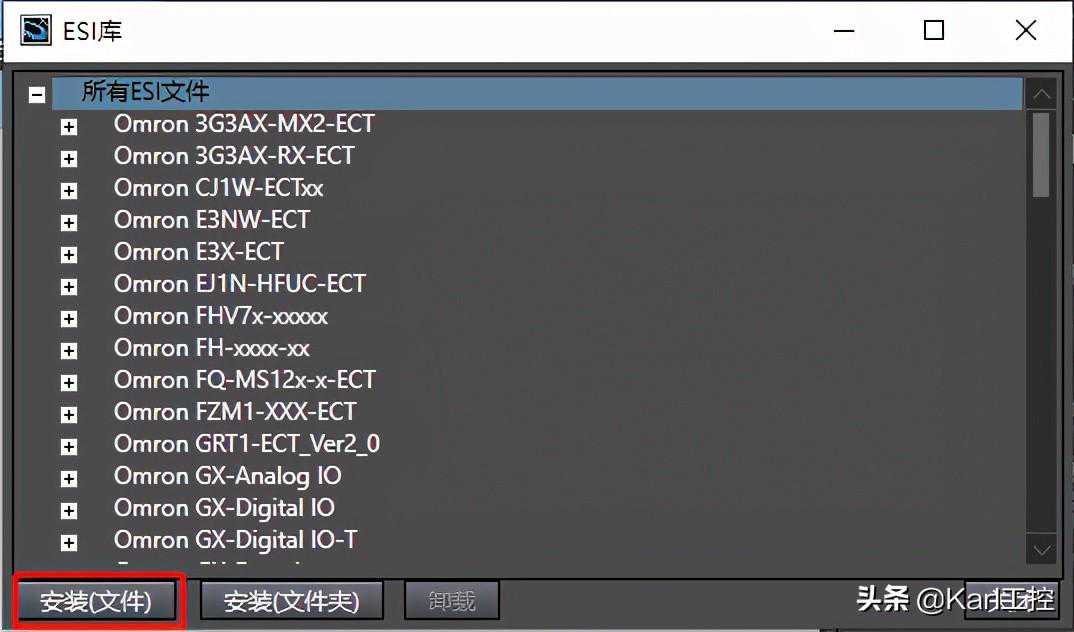
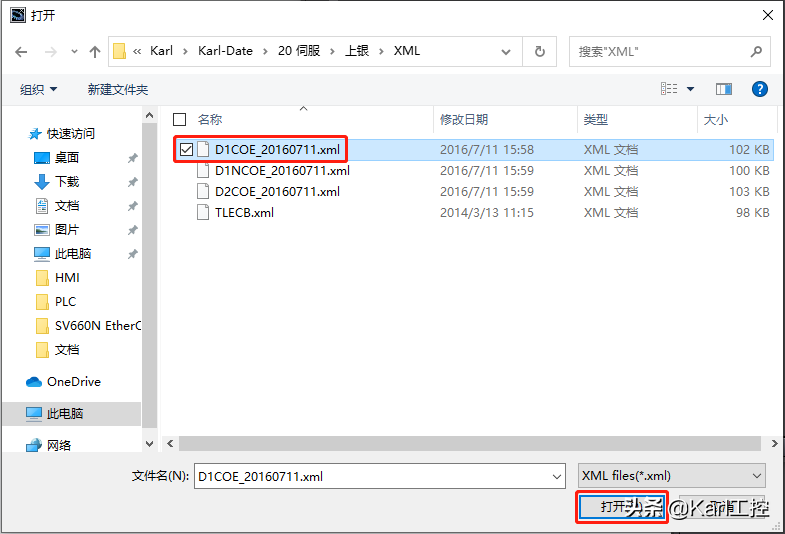
1.2安装XML文件
展开【配置和设置】,双击打开【EtherCAT】


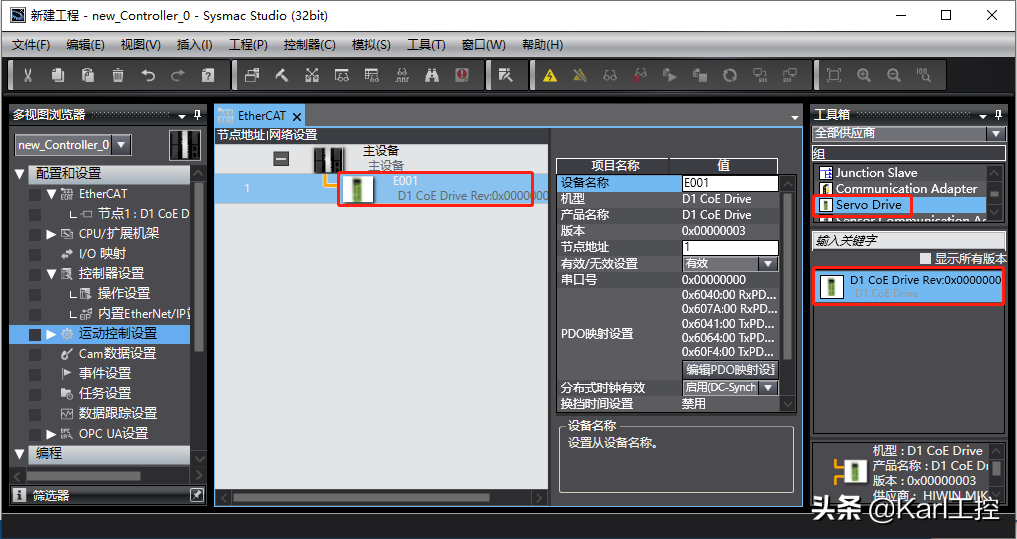
1.3组态驱动器
选中【主设备】在工具箱下面选择要添加的设备系列,双击要添加驱动器(也可以使用拖拽的方式将其拖到主设备下面),这时可以看到主设备下面多出一个设备,驱动器组态成功。
2.PDO映射设置
2.1打开【编辑PDO映射设置】

2.2输出(添加6060、60B8)
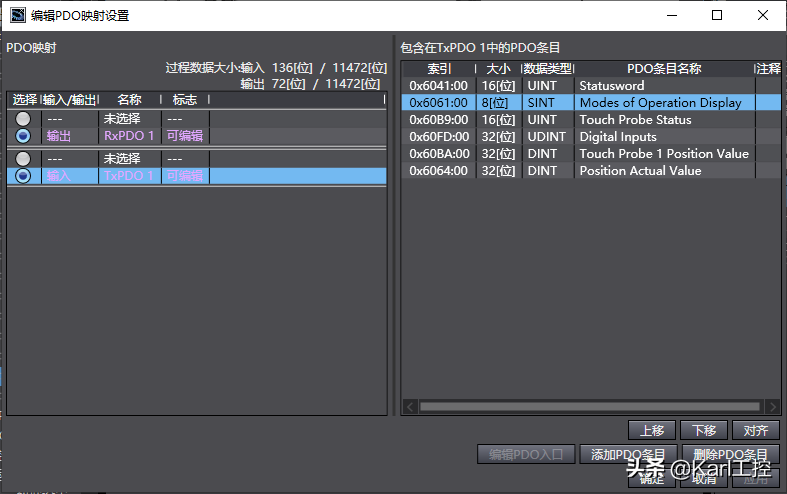
2.3输入(删除60F4,添加6061、60B9、60FD、60BA)
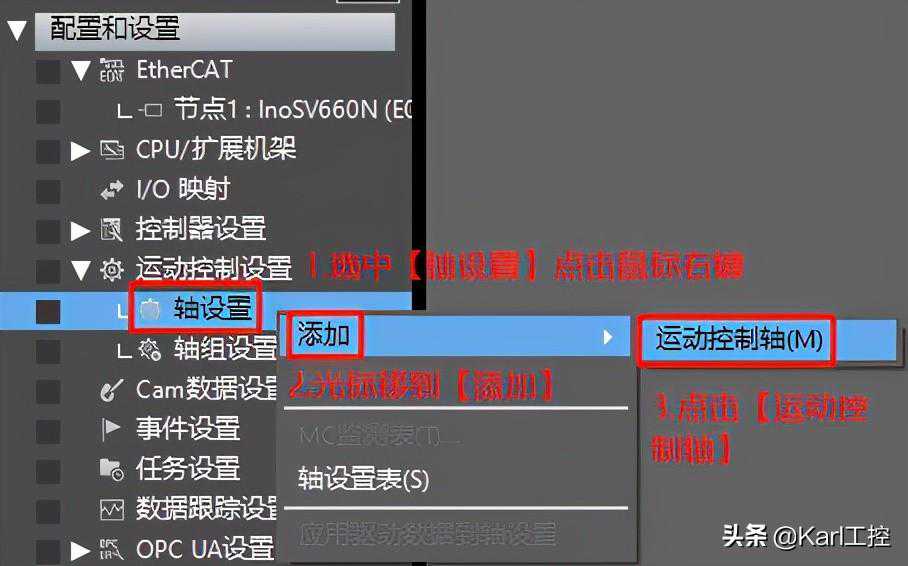
3.轴设置
3.1添加一个单轴位置控制轴
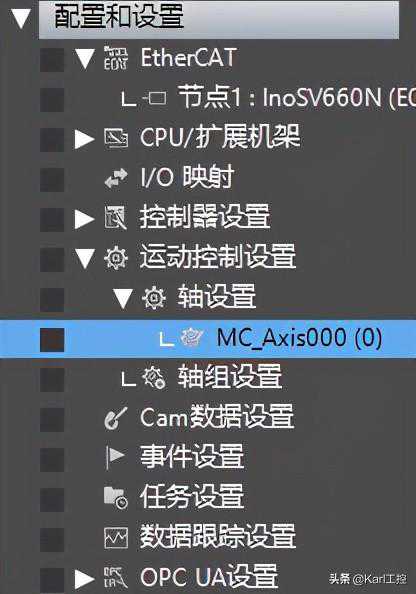
成功添加一个轴【MC_Axis000】

3.2轴基本设置
双击刚刚添加的轴【MC_Axis000】。轴类型选择【伺服器轴】,输出设备1选择【节点1】
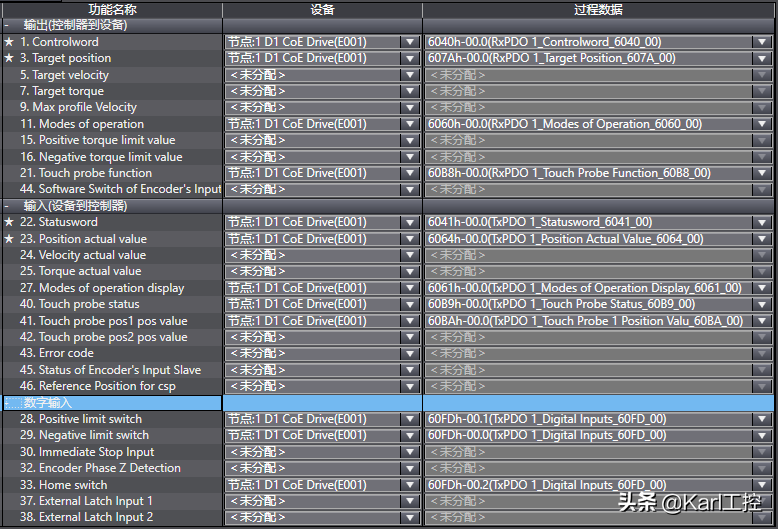
详细设置
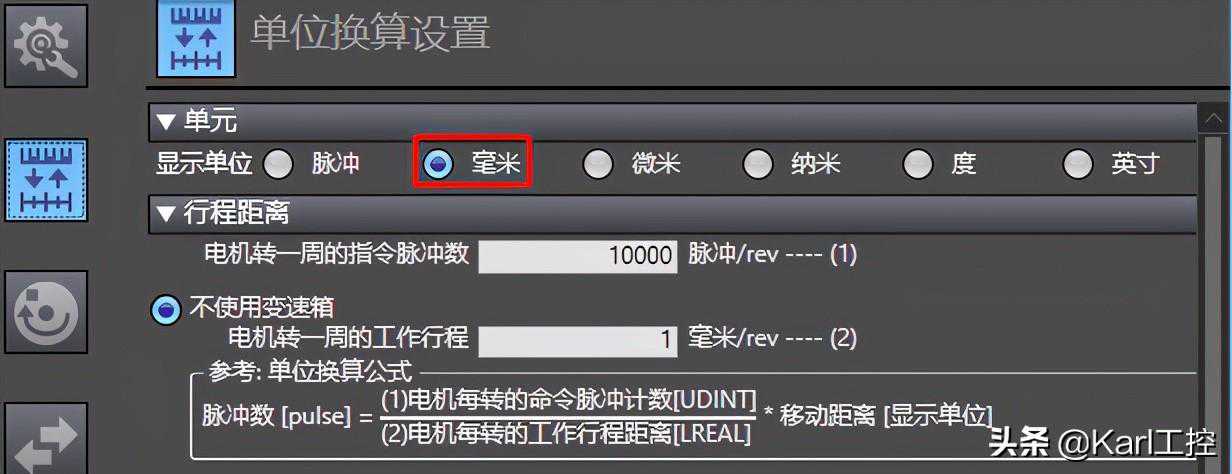
3.3单位换算设置
显示单位勾选毫米
电机转一周的指令脉冲数设置为10000。
电机转一周的工作行程设置为1。例如光栅尺的精度是0.1牛米,无减速机,那么这里填1。如果有减速机,速比为1:2,那么这里填0.5。
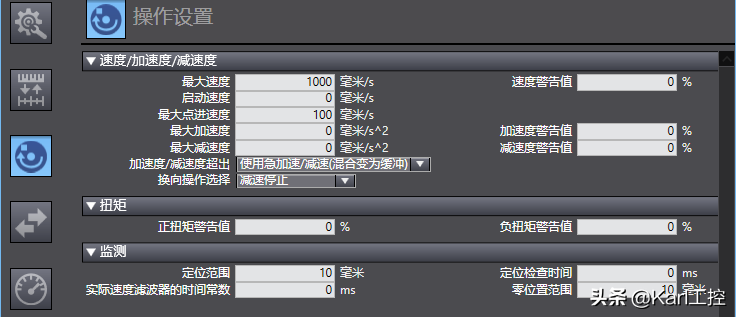
3.4操作设置
最大速度设置为1000,最大点进速度设置为100
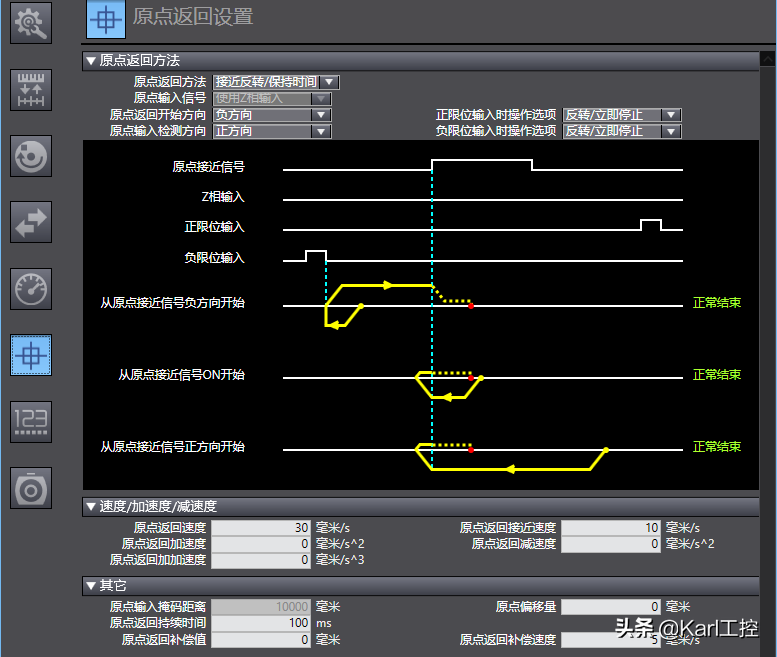
3.5原点返回设置
原点返回方法选择为【接近反转/保持时间】,原点返回开始方向选择为【负方向】,原点输入检测方向选择为【正方向】
3.6其它设置
其它设置采用默认即可。
以上就是本篇的全部内容感谢大家的观看,谢谢!
创作不易,点个赞再走呗!







